近日,,曾柱,、鄭強團隊成果以“Towards a Sustainable Monitoring: A Self-Powered Smart Transportation Infrastructure Skin”為題,在NanoEnergy(IF=17.8)雜志上發(fā)表學術(shù)論文,。該論文第一單位為貴州醫(yī)科大學生物與工程學院,,合作單位包括北京工業(yè)大學、北京納米能源與系統(tǒng)研究所,、北京科技大學,、東南大學等。
可持續(xù)的實時交通流監(jiān)測是目前道路工程師們關(guān)心的一大問題,,它不僅可以獲取實時動態(tài)交通數(shù)據(jù),,干預道路擁堵,,還可以與交通云平臺互補,記錄不規(guī)范駕車?,F(xiàn)有交通傳感器一般需要外部電源,,這使得長期服務(wù)幾乎不可能。此外,,許多傳感器需要埋在道路結(jié)構(gòu)內(nèi),,由于傳感器和道路材料間存在剛性差異,因此在交通負荷下,,傳感器和道路材料的變形是不一致的,,可能由此導致傳感器精度降低甚至失效。而這種埋入式的安裝方式也會改變基礎(chǔ)設(shè)施的材料的一致性,、均勻性和連續(xù)性,。
受人體皮膚構(gòu)造和工作原理啟發(fā),曾柱,、鄭強教授團隊基于摩擦納米發(fā)電機技術(shù)(TENG)提出了一種自供能的智能交通基礎(chǔ)設(shè)施仿生電子皮膚系統(tǒng)(SSTIS),,從而實現(xiàn)智能城市的可持續(xù)實時交通流監(jiān)測。該系統(tǒng)包括:可方便粘貼在道路表面的自供能,、近零功耗柔性傳感器,、基于人工智能(AI)開發(fā)的智能分析系統(tǒng)和基于云平臺和Android框架的移動交通信號信息監(jiān)測反饋系統(tǒng)。該研究也是首次將TENG技術(shù)用于真實條件下主干道大規(guī)模車輛信息傳感,,并表現(xiàn)出相當?shù)姆€(wěn)定性,、靈敏性和智能性,具有良好的實用價值,,有利于構(gòu)建分布式城市物聯(lián)網(wǎng)傳感系統(tǒng),。
通過該研究提出的SSTIS系統(tǒng),可以實現(xiàn)對車輛,、道路,、橋梁、建筑物等民用基礎(chǔ)設(shè)施的自供能,、可持續(xù),、實時準確監(jiān)測,可以用于輔助自動駕駛輔助決策,、交通基礎(chǔ)設(shè)施損壞預警,、高效改善交通流等常規(guī)公共功能。
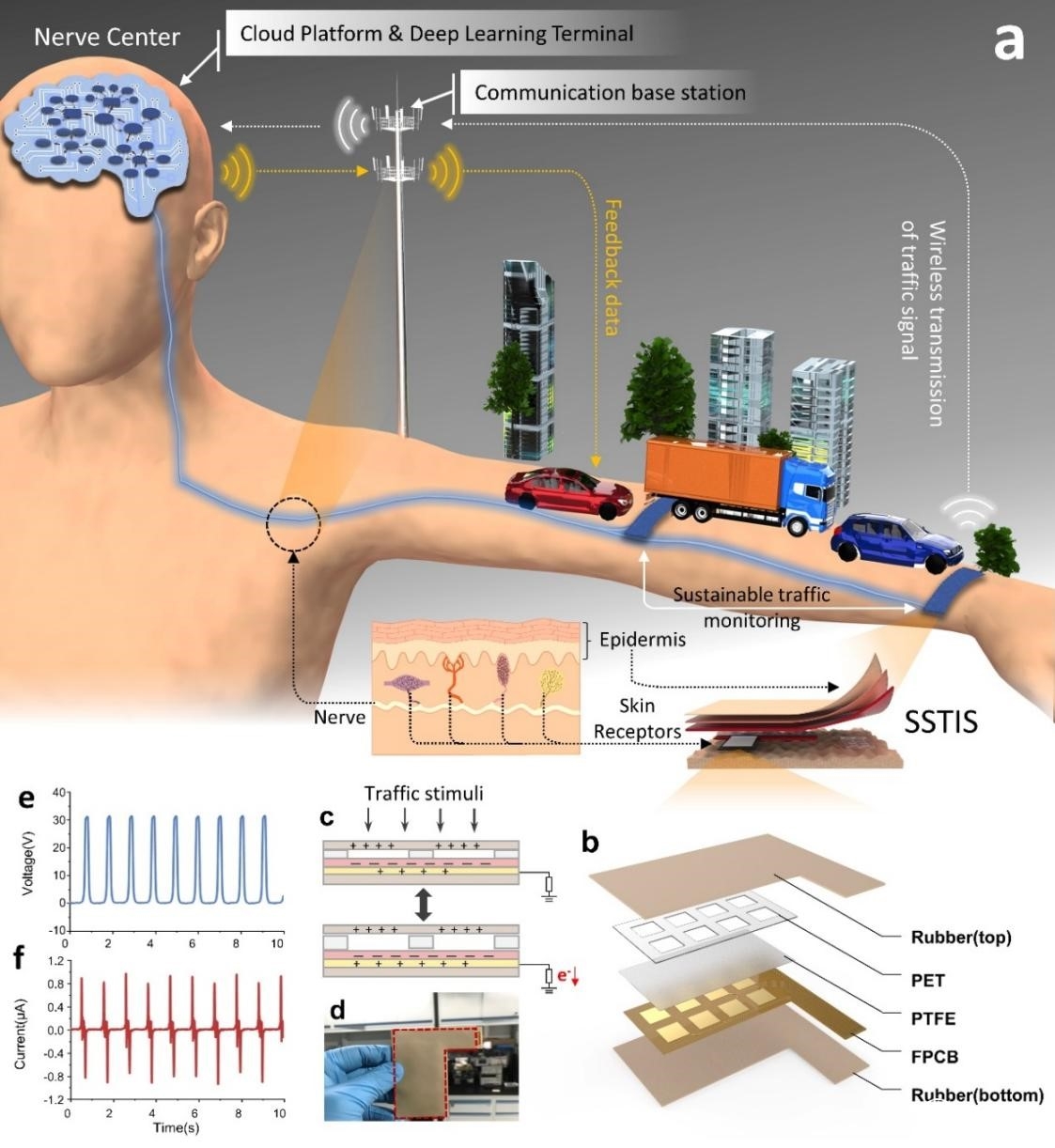
圖1.智慧城市中的自供能智能交通基礎(chǔ)設(shè)施皮膚(SSTIS)系統(tǒng),。a. 將TENG傳感器粘貼并固定在路面上,,構(gòu)建智能交通基礎(chǔ)設(shè)施表皮系統(tǒng)。傳感器收集車輛信號,然后這些數(shù)據(jù)可以通過無線系統(tǒng)(4G/5G/6G)傳輸?shù)街腔鄢鞘械拇竽X,。大腦使用基于人工智能的方法,,如深度學習方法,來處理,、分析并向道路使用者提供實時交通信息,。 b. TENG結(jié)構(gòu)示意圖。從上到下使用的材料是橡膠(上),、PET,、PTFE、FPCB和橡膠(下),。 c. TENG傳感器的工作機制。本研究中使用了單電極模式的TENG,。傳感器的兩種不同材料(橡膠和PTFE)通過相互摩擦攜帶等量的異種電荷,。該裝置在外力條件下完成了壓縮-釋放循環(huán)。當兩種材料之間的距離發(fā)生變化時,,在底部摩擦層(PTFE層)的外部產(chǎn)生了一個感應(yīng)電場,。d. 基于TENG的仿生傳感器陣列封裝圖像。 e. f. TENG傳感器的性能表征結(jié)果,,即開路電壓(藍色)和短路電流(紅色),。
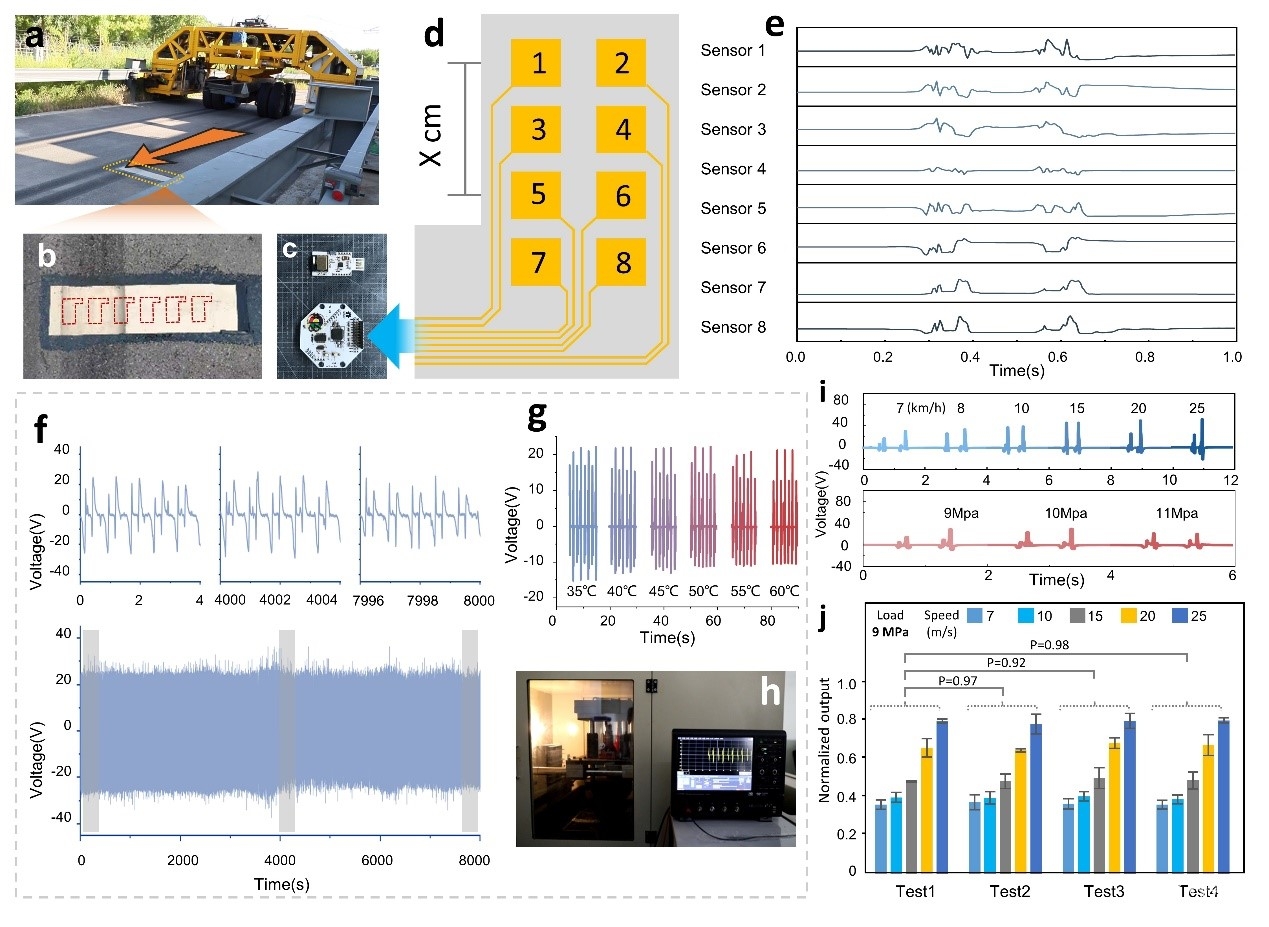
圖2.對SSTI系統(tǒng)的測試。a. APT實驗裝置的圖像,。 b. 傳感器實物的圖像,。c. 藍牙模塊。 d. e. TENG傳感器產(chǎn)生的8組實時車輛信號信息,。 f. 實驗室的室內(nèi)疲勞測試結(jié)果,。傳感器在超過10000次的疲勞測試中表現(xiàn)出穩(wěn)定的輸出性能。 g. 環(huán)境溫度測試的結(jié)果,。TENG傳感器在溫度持續(xù)變化時輸出了穩(wěn)定的電壓結(jié)果,。 h. 室內(nèi)疲勞測試的檢測儀器。 i. APT測試結(jié)果,。TENG仿生傳感器陣列的輸出變化結(jié)果隨速度和壓力條件的變化而變化,。 j. TENG傳感數(shù)據(jù)在50次循環(huán)測試中的標準化輸出。
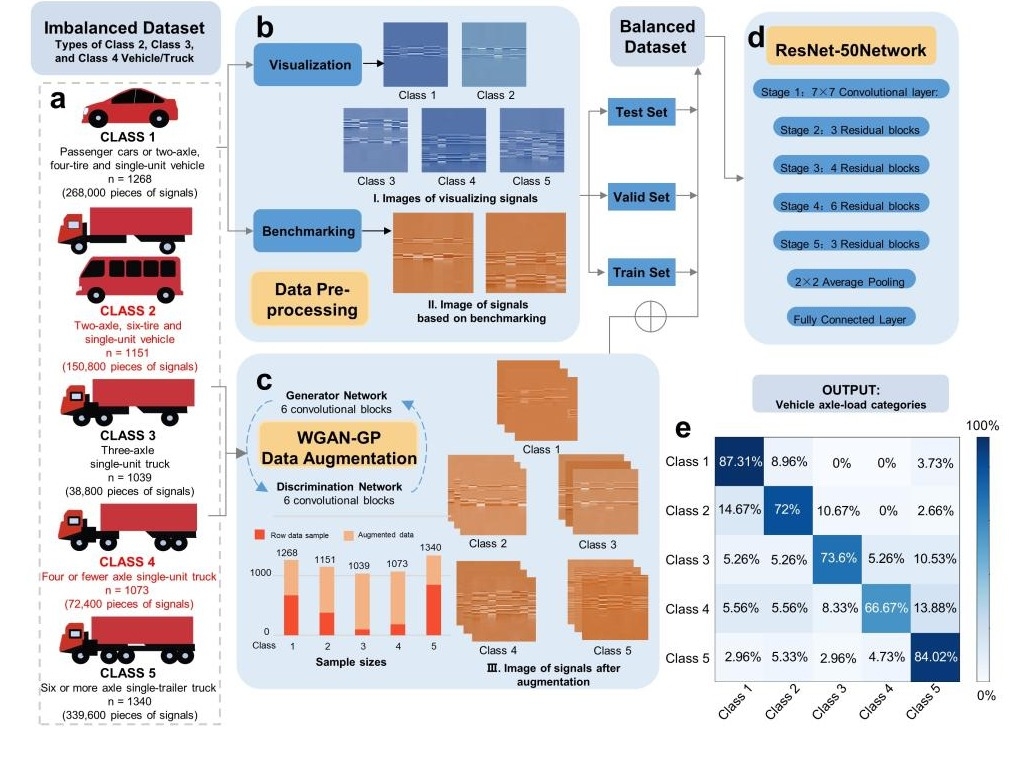
圖3.算法分析不同車輛軸重類型的數(shù)據(jù)分析,。a. 手工標記后的不平衡車輛信號數(shù)據(jù)集(包括670輛乘用車或兩軸,、四輪胎和單體車輛,377輛兩軸,、六輪胎和單體車輛,,97輛三軸單體卡車,181輛四軸或以下單體卡車和849輛六軸或以上單體卡車)。 b. 信號預處理-可視化和基準測試,。c. 由WGAN-GP模型增強的平衡車輛信號數(shù)據(jù)集(包括1268輛乘用車或兩軸,、四輪胎和單體車輛,1151輛兩軸,、六輪胎和單體車輛,,1039輛三軸單體卡車,1073輛四軸以下單體卡車和1340輛六軸以上單體卡車),。 d. ResNet-50深度學習算法用于分析不同車輛的軸載類型,。訓練、驗證和測試集的組成(包括5000張訓練圖像,、438張驗證圖像和433張測試圖像),。 e. ResNet-50殘余神經(jīng)網(wǎng)絡(luò)的每種車輛軸載類型的混淆矩陣。
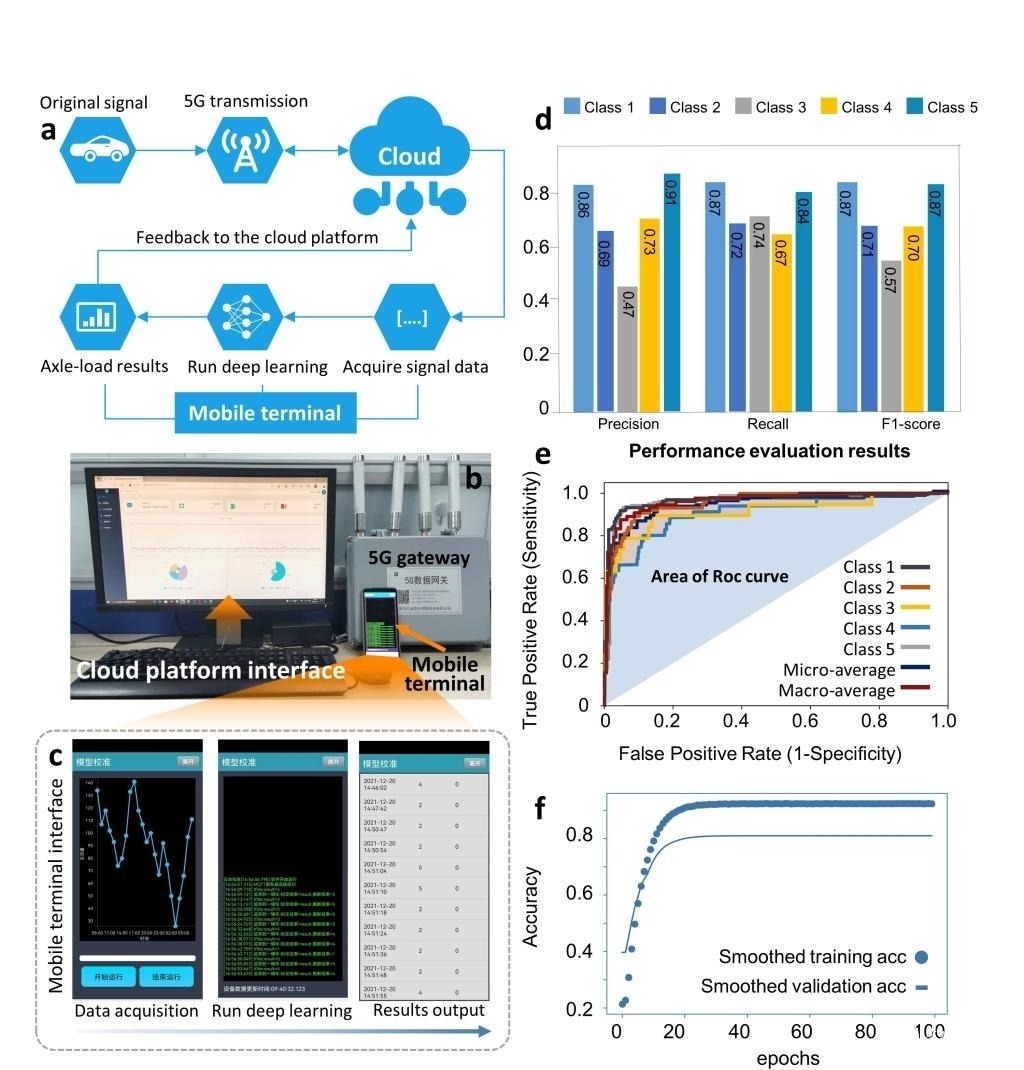
圖4.云平臺構(gòu)建和應(yīng)用構(gòu)建,。a. 應(yīng)用程序的開發(fā)過程,。開發(fā)過程包括轉(zhuǎn)換TFLite,在Android Studio平臺上建立Android項目,,生成APK包,,安裝移動應(yīng)用。 b. 云平臺主頁,。頂部欄目,,系統(tǒng)信息,終端設(shè)備數(shù)量,,APP用戶和運行結(jié)果,。中間,CPU使用率和內(nèi)存使用率的展示,。底部餅狀圖,,不同軸載的車輛數(shù)量和各軸載類型的車輛占比。在APP中,,可以實時獲取車輛軸載信號的分類結(jié)果,。 d. 模型結(jié)果。e. ROC和AUC展示了分類模型的整體性能和每種類型車輛軸載的分類效果,。 f. 還展示了訓練集和驗證集的精度曲線,。該模型的最終測試精度達到81.06%。